Fejl er billige i simuleringen. De er dyre på produktionsgulvet.
Robot simulering handler om at flytte beslutninger frem i tid — til der hvor de kan tages på et oplyst grundlag, uden at noget er skruet fast, svejset eller betalt. Layout valideres, cyklustider måles, kollisioner opdages og sikkerhedszoner afprøves — alt sammen inden første komponent er bestilt.
Hos RobotCoder er simulering ikke et ekstraprodukt. Det er en integreret del af den måde vi arbejder med robotprojekter på — fordi det konsekvent giver bedre resultater ved idriftsættelse og færre overraskelser i produktionen.
Hvad bruger vi simulering til?
Simulering dækker en bred vifte af use cases i et robotprojekt — fra de tidlige layoutbeslutninger til den endelige validering af programlogik og sikkerhedsfunktioner.
Layoutvalidering og kapacitetsberegning
Placering af robot, emner, udstyr og mennesker optimeres virtuelt. Rækkevidde og singulariteter afklares, inden noget fysisk placeres.
Cyklustidsestimat og afsøgning af flaskehalse
Vi giver det mest præcise cyklustid under realistiske betingelser og identificerer hvor tid kan vindes uden at gå på kompromis med kvalitet eller sikkerhed.
Kollisions- og rækkeviddeanalyse
Robottens bevægelsesbaner analyseres for kollisioner med udstyr, afskærmning og andre robotter. Kritiske punkter identificeres og korrigeres virtuelt.
Sikkerhedszonering og CE-dokumentationsgrundlag
Sikkerhedszoner, nødstopscenarier, stoptider og adgangsforhold dokumenteres i simuleringen og udgør grundlaget for risikovurdering og CE-mærkning.
Præsentation for beslutningstagere og investorer
3D-visualiseringen gør komplekse robotløsninger forståelige og konkrete for alle interessenter — ikke kun de tekniske. Det letter intern godkendelse og reducerer misforståelser.
Offline programmering
Simuleringen er grundlaget for udvikling og test af robotprogrammet, inden robotten fysisk er tilgængelig. Programudvikling og simulering hænger uløseligt sammen.
Virtual commissioning — idriftsættelse starter i simuleringen
Virtual commissioning er det næste skridt efter simulering. Her kobles den virtuelle robotcelle sammen med den faktiske PLC-logik — og hele anlægget idriftsættes digitalt, inden det fysisk eksisterer.
Det betyder at PLC-kommunikation, buskonfiguration, sikkerhedsfunktioner og robotprogram testes og valideres samlet. Fejl i grænsefladen mellem robot og PLC — som typisk først opdages sent i et traditionelt projekt — afklares tidligt og billigt.
Resultatet er en markant kortere fysisk idriftsættelsesperiode og et anlæg der opfører sig som forventet fra første opstart.
De simuleringsværktøjer vi arbejder med
Vi arbejder med de native simuleringsplatforme fra de robotfabrikanter vi programmerer. Det sikrer at simuleringen er tæt koblet til den specifikke controller og det specifikke programmeringssprog — ikke en generisk tilnærmelse der introducerer usikkerheder.
ABB RobotStudio
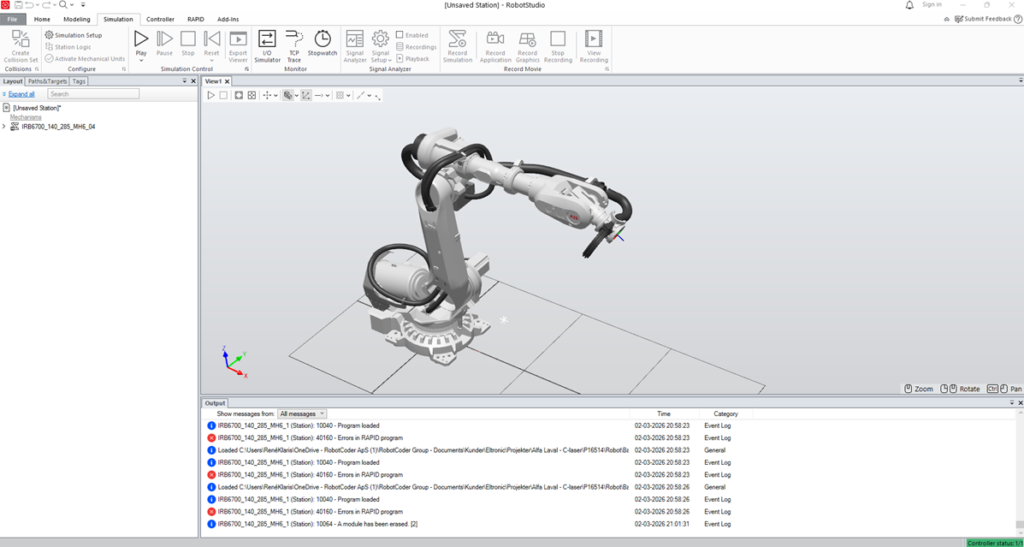
RobotStudio er markedets mest modne simuleringsplatform til industrirobotter. Den virtuelle controller er en fuld software-kopi af den fysiske ABB-controller — det program der kører i simuleringen er identisk med det der kører på robotten. Cyklustider, sikkerhedslogik og PLC-kommunikation kan valideres fuldt ud inden idriftsættelse.
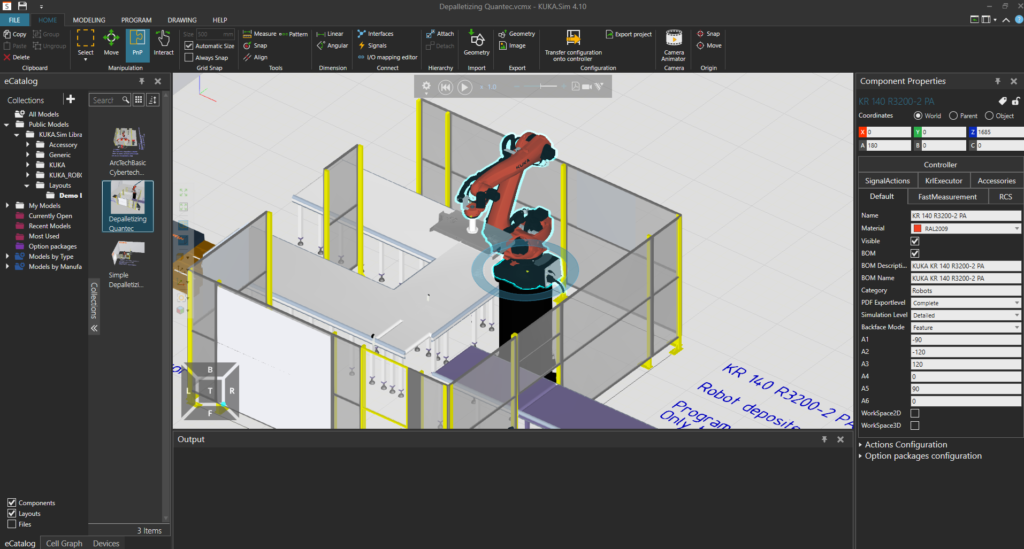
KUKA Sim og iiQWorks.sim
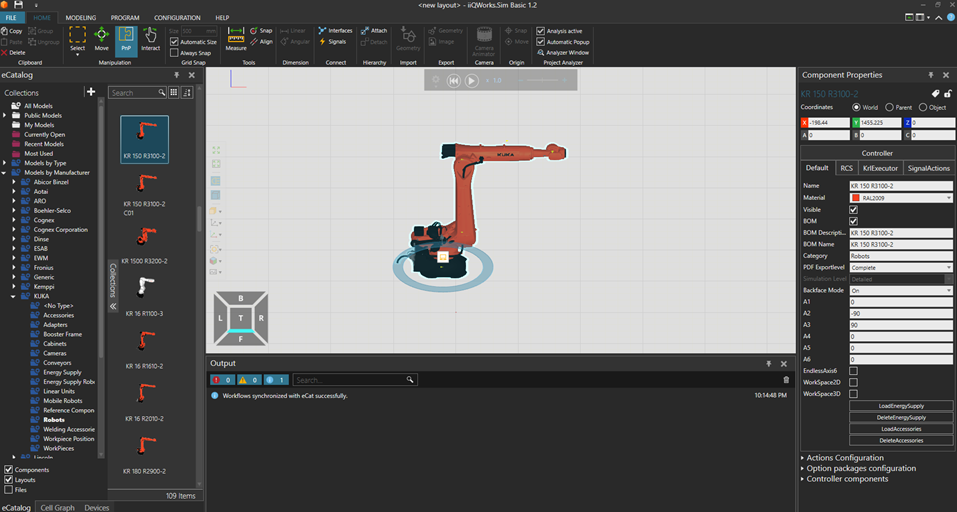
For nye KUKA-anlæg på KR C5-2-hardware arbejder vi i iiQWORKS.Sim — KUKAs nye platform der samler konfiguration, simulering og offline-programmering ét sted. Den avancerede version tilbyder Roundload, der giver direkte synkronisering mellem den virtuelle og fysiske controller. For eksisterende KR C4/5-anlæg er KUKA.Sim fortsat den relevante platform.
FANUC Roboguide
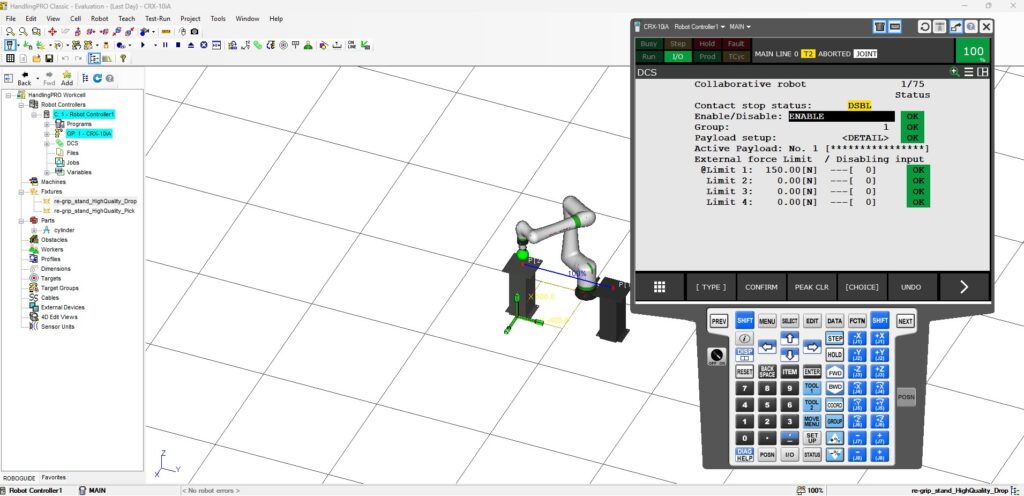
Roboguide understøtter 3D-simulering, offline-programmering og cyklustidssimulering på tværs af FANUCs robotportefølje. Vi anvender det til rækkeviddeanalyse, banevalidering og dokumentation af cyklustider inden idriftsættelse.
Yaskawa MotoSim
MotoSim EG-VRC er Yaskawaplatformens simuleringsværktøj og anvendes i projekter med Yaskawa-robotter — særligt i multi-robot-konfigurationer med koordineret bevægelse, hvor simulering er afgørende for at validere timing og kollisionsfrihed.
Hvad får I leveret?
Et simuleringsforløb hos RobotCoder leverer konkrete, brugbare resultater — ikke blot en 3D-animation:
Valideret simuleringsmodel
Robotcellen med korrekt geometri, kinematik og controller
Cyklustidsrapport
Dokumenterede tider under realistiske produktionsbetingelser
Kollisions- og rækkeviddeanalyse
Dokumentation af kritiske punkter og løsninger
Visualiseringsvideo
Til intern præsentation for ledelse, kunder eller investorer
Sikkerhedsdokumentation
Grundlag for risikovurdering og CE-proces
Simuleringsmodel til fremtidig brug
Til brug ved ændringer, udvidelser, oplæring eller nye varianter

Kontakt os
Fortæl os om jeres robotprojekt — hvad der skal automatiseres, hvilke krav der er til cyklustid og layout, og hvor I er i processen. Så vurderer vi hvad simulering konkret kan bidrage med i jeres projekt.
Ring til os på +45 50 90 10 98 eller brug kontaktformularen nedenfor.